
What is AUTOSAR ? | AUTOSAR
Basics

%20(1)-min.jpg){kind=link}
AUTOSAR is an “AUTomotive
Open System ARchitecture” that was developed to design a standardized embedded
software architecture for automotive electronic control units (ECUs).
- It was jointly developed by automobile manufacturers, electronics and software suppliers and tool vendors as middleware and system-level standards.
- AUTOSAR is a platform in the entire automotive industry that will enhance the scope of applications of vehicle functionalities without disturbing the existing model.
- The automotive industry will enhance the scope of applications of vehicle functionalities without disturbing the existing model.
Need of AUTOSAR over NON-AUTOSAR Standard | Need of AUTOSAR over Legacy Software
i) Using the AUTOSAR standard, the application software components (ASWC) are completely independent of the hardware.

- Without the AUTOSAR standard Application component was redeveloped by considering the underlying hardware interface protocol, drivers, and microcontroller.
- After Using the AUTOSAR standard, the application does not require to know from where the dependencies and inputs came.
- Application software components (ASWC) can be reused in any other project independent of the underlying hardware multiple times. It will save a lot of time and money to develop.
ii) AUTOSAR was developed to standardize software components and Interfaces:
- Any project has the composition of several complex software components, it can be easily implemented using AUTOSAR standard.
- Using the AUTOSAR standard needs to create new software components then, the focus will be only on implementing the inside logic and algorithm, without having to adapt the entire OEM environment.
- Standardized interfaces will provide ease and simple connection to newly created software components with our existing project.
Since,
all of the benefits of using AUTOSAR, OEM’s have more time to innovate on their
features and applications by considering market competitions.
AUTOSAR Layered Architecture:
The AUTOSAR architecture is a three-layered architecture model.

i) Application Layer (ASWC):
- It includes various application-specific software components (ASWC) that are designed to execute a specific set of tasks according to the end-user application.
- One complete OEM feature (Seating, Lighting, Air-Bag Etc.) in vehicles is possible to deliver by combining multiple application software components (ASWCs) in a single ECU.
ii) Runtime
environment (RTE):
- It acts as a medium between the AUTOSAR application layer and all lower layers including the Basic Software Layer (BSW), Microcontroller Abstraction Layer (MCAL), and ECU Abstraction Layer (ECUAL).
- RTE will handle intra-ECU communication in between application layer software components (ASWCs) in a single ECU and inter-ECU communication between the BSW Modules through the application layer of two ECU.
iii) Basic Software Module (BSW):
- It can be defined as a standardized embedded software module that handles various functionality, services required to run the functional part of the upper application software layer (ASWC).
- This layer consists of a generic Service Module, ECU specific module according to the end application, and a Controller Driver Layer for hardware drivers.
This layer is further divided into three sub-layers :

1. Microcontroller Abstraction Layer (MCAL):
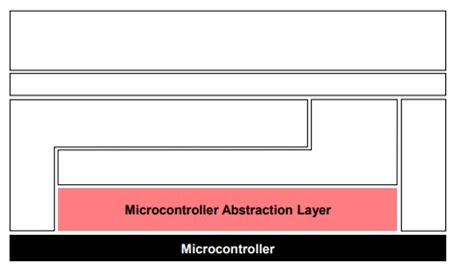
- It is the lowest software layer of the Basic Software (BSW). It includes internal drivers, which are software modules with direct access to the microcontroller and its internal peripherals.
- It will make the higher software layers (application and BSW) abstract independent of lower-lying hardware (microcontroller).
- MCAL implementation is completely microcontroller-dependent. Its interface with the upper layer is standardized and microcontroller independent
2. Service
Layer :
- The Services Layer is the highest layer of the Basic Software which also applies for its relevance for the application software:
- while access to I/O signals is covered by the ECU Abstraction Layer, the Services Layer offers: Ø Operating system functionality Ø
- Vehicle network communication and management services Ø
- Memory services (NVRAM management) Ø Diagnostic Services (including UDS communication, error memory and fault treatment) Ø
- ECU state management, mode management Ø Logical and temporal program flow monitoring (Wdg manager) Task Provide basic services for applications, RTE and basic software modules. Properties Implementation: mostly µC and ECU hardware independent Upper Interface: µC and ECU hardware independent

It includes all service manager modules like Diagnostic, Communication, and Memory services.
3. ECU
Abstraction Layer (ECUAL) :
- The ECU Abstraction Layer interfaces the drivers of the Microcontroller Abstraction Layer. It also contains drivers for external devices. It offers an API for access to peripherals and devices regardless of their location (µC internal/external) and their connection to the µC (port pins, type of interface) Task Make higher software layers independent of ECU hardware layout Properties Implementation: µC independent, ECU hardware dependent Upper Interface: µC and ECU hardware independent.

- It includes sensor and actuators driver developed which are not part of the MCAL layer.
- The Complex Drivers Layer spans from the hardware to the RTE. Task Provide the possibility to integrate special purpose functionality, e.g. drivers for devices: Ø which are not specified within AUTOSAR, Ø with very high timing constrains or Ø for migration purposes etc. Properties Implementation: might be application, µC and ECU hardware dependent Upper Interface: might be application, µC and ECU hardware dependent
AUTOSAR Standard Pros :
- Different supplier can work on one product using standard interface/architecture.
- Reusability is more for software component
- The layered software architecture
- Interfaces consistency
- Modules and interfaces interoperability
- Cost and software development time will be reduced
- Efficient functional development
AUTOSAR Standard Cons :
- More Complexity
- Initial Cost Investment
- More Learning Curve
Applications :
- Sensors like LIDAR and RADAR
- Electrification
- Automotive Apps
- ADAS Functions with a Camera
- Infotainment
- Predictive Maintenance
{kind=link}
0 Comments